3、模糊PI控制器设计
3.1、模糊化
模糊控制中的被观测量通常是一个在一定精度范围内的精确数值量,而模糊控制的操作是基于模糊集合理论的,因此,要进行模糊操作首先要对被观测量进行模糊化,模糊化必须按照一定的隶属度函数来进行,定义输入量的隶属度函数通常由三角形、梯形和吊钟型,理论上来讲吊钟型最为理想,但在工程上实现时计算复杂,可操作性不强。实践证明,用三角形或梯形函数的实现性能与吊钟型的并没有十分明显的差别,真正对控制器性能影响较大的是隶属度函数对论域的覆盖面大小,考虑到隶属度函数曲线的简单化和芯片处理的方便化,工程商常用三角形或梯形的隶属度函数来对输入量进行模糊化。
对于本文的系统,要求输入偏差绝对值lel小余20%,取量化的基本论域为[-6,6],总共13个量化等级,量化因子 ,并对量化结果进行四舍五入运算,取偏差e在论域上的语言集合为{NL,NM,NS,Z,PS,PM,PL}。
,并对量化结果进行四舍五入运算,取偏差e在论域上的语言集合为{NL,NM,NS,Z,PS,PM,PL}。
对于偏差变化率的绝对值|lel|,要求其不能大于6,取量化的基本论域为[-6,6],总共7个量化等级,量化因子 ,同样,要对量化结果进行四舍五入运算,取偏差变化率|e|在论域上的语言集合为{NL,NM,NS,Z,PS,PM,PL}。
,同样,要对量化结果进行四舍五入运算,取偏差变化率|e|在论域上的语言集合为{NL,NM,NS,Z,PS,PM,PL}。
对输入输出的隶属度函数曲线都选为梯形,如图4所示。
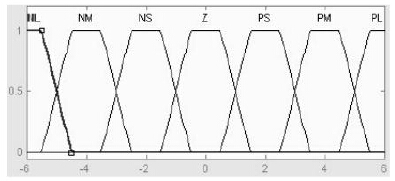
图4 隶属度函数曲线
3.2、确定模糊规则
模糊规则用来修正PID控制器的参数,因此,模糊规则表的选取十分重要。模糊规则推理的输入输出都是模糊量,不同的模糊推理的出来的结果是不一样的,而采用不同的模糊推理方法,语言变量的分档也是不一样的。模糊推理方法有Zadeh法、Mamdani法和Baldwin法等,本文采用Mamdani发,也即MAX-MIN法来进行模糊推理,其方法为:分别在不同规则中采用各自推理的前件的总隶属度去切割本推理规则中后件的隶属度函数以得到输出结果,最后对所有的结论进行模糊逻辑并运算,得到总的推理结果,简单来说就是:前件取极小值,后件取极大值。
根据PID调节规律,结合实际光伏阵列的端电压与输出电流的关系情况,得到表1所示的调节规则表,其中表1(a)为|Kp|的模糊规则,表1(b)为|Ki|的模糊规则,这些规则都是用模糊语言量来表示的。
表1 模糊PI控制规则表
(a)|Kp|规则表
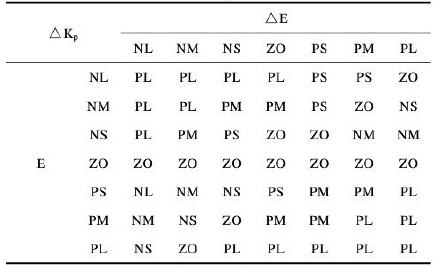
(b)|Ki|规则表

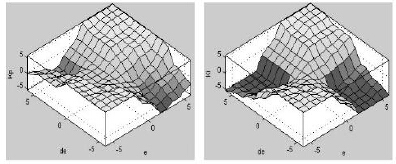
运用MATLAB的模糊工具箱,画出本文的模糊控制器的非线性关系曲面图,其中图5(a)是|Kp|与e、|e|的关系,图5(b)是|Ki|与e、|e|的关系,普通PID调节器在xyz三维空间里是一张通过坐标原点的平面,其具有线性调节规律,而模糊控制器在三维空间中是一张通过原点的分片二次曲面,整张曲面毕竟一个阶数可以很高的非线性调节规律,故其整体控制效果要优于普通的PID调节器,模糊控制器在控制过程中的前期阶段具有模糊控制器的全部优点,而在控制过程的后期阶段又具有PID调节器的所有优势,因此是一种性能良好的控制器。
3.3、反模糊化
经过模糊推理后的结果是一些语言量的模糊结果,这种结果是无法对精确的模拟或数字系统进行控制的,我们必须进行反模糊化,通过精确化计算得出此模糊集中最有代表意义的确定值作为系统的控制输出。反模糊化有很多种不同的方法,如重心法、最大隶属度法、中位数法等,重心法不仅有公式可循,而且理论上比较合理,它涵盖利用了模糊理论的所有信息,并根据隶属度的不同而有所侧重,因此本文选用重心法作为反模糊化的方法。